光刻机极紫外曝光系统分析
极紫外光刻曝光光学系统是极紫外光刻机的核心部件,其设计直接影响极紫外光刻机的性能。极紫外光刻机曝 光系统的设计难度大、研究周期长,国外极紫外光刻机产品已经用于高端芯片的制造,但国外对中国禁运相关产品。国 内极紫外光刻机曝光系统的设计和研发始于 2002 年。国内相关领域的研究主要聚焦在极紫外光刻机曝光光学系统的光 学设计、像差检测、公差分析、热变形分析等。结合国内外极紫外光刻机曝光光学系统设计研究的历史和现状,较为系统 地综述了极紫外光刻投影物镜和照明系统的设计研究与进展,包括:极紫外光刻机投影物镜系统及其设计方法、极紫外 光刻照明系统及其设计方法、极紫外光刻曝光光学系统的公差分析、热变形及其对成像性能的影响研究,这为我国从事 极紫外光刻机研制、曝光系统光学设计与加工的学者、工程师等提供了极紫外光刻机曝光系统设计研究的历史、现状和 未来趋势的相关信息,助力我国极紫外光刻机的设计和研制。
参考文献https://www.researching.cn/ArticlePdf/m00006/2023/43/15/1522002.pdf
1 引 言 光 刻 机 是 超 大 规 模 集 成 电 路(Integrated circuit,IC)制造所需的关键设备,其技术和设备的发展历程如 图 1所示。
光刻机沿摩尔定律预言发展至今,光刻成 像分辨率不断跨越光学成像分辨率极限。因此,需不 断提高光刻机曝光系统(照明系统和物镜系统)的光学 成像性能,这将导致光刻机曝光系统光学设计和研制 难度不断攀升。7~1 nm 技术节点,迫切需要高性能、 高数值孔径(Numerical aperture,NA)(0. 33~0. 55)以 及变倍率极紫外(Extreme ultraviolet, EUV)光刻机。 曝光光学系统主要由光源、照明系统、反射式掩模、物镜 系统、硅片等部分组成,曝光光学系统的性能直接影 响光刻成像性能和芯片制造如图 2所示。

图1 摩尔定律下 ASML 光刻机的发展历程
Fig. 1 Development of lithography machine for ASML under Moore's Law
光刻机曝光系统设计方法、加工技术和分辨率增 强技术的不断突破,光刻分辨率不断提高。光刻分辨率定义为满足光刻性能要求的、晶圆上光刻胶成像的 最小特征尺寸(CD),可表示为
CD = k 1* λ/ NA,(1)
式中:CD 为光刻特征尺寸;λ 为曝光光源波长;NA 为 物镜系统的像方数值孔径;k 1 为工艺因子,多种分辨率 增强技术可实现 k 1 < 0. 61。如图 1 所示,光刻机沿着 缩短曝光光源波长、增大物镜系统 NA 和降低 k 1 的路 径发展,不断地提高光刻分辨率,光刻机光源的波长经 历 了 436 nm(g[1]line)、365 nm(i[1]line)、248 nm(KrF)、 193 nm(ArF)和 13. 5 nm(EUV)。本文重点介绍 EUV 光刻机及其曝光系统的光学设计研究与进展。

图 2 EUV 光刻照明和物镜示意图
Fig. 2 Schematic diagram of EUV lithography lighting and objective
EUV 光 刻 机 的 曝 光 波 长 为 13. 5 nm,为 了 避 免 EUV 光被吸收,EUV 光刻机曝光光学系统需要采用 多层膜反射镜构成全反射式结构。然而,多种因素 导致 EUV 光刻技术经历了漫长的发展过程。20 世纪 80 年 代,日 本 电 报 电 话 公 司(Nippon Telegraph & Telephone,NTT)的木下博雄(Kinoshita)首次公布了 波长为 11 nm 的软 X 射线光刻获得 200 nm 线宽的曝光结果。
1999 年,日本成立 ASET(Association of Super[1]Advanced Electronics Technologies)联合研发机 构 。
1999—2000 年,日 本 姬 路 工 业 大 学(Himeji Institute of Technology,HIT)木 下 博 雄 团 队 作 为 ASET 联合研发机构成员,利用 13. 5 nm 同步辐射光 源和自主研制的 EUV 曝光系统,获得了 56 nm 图形的 大面积曝光结果,实验证明大面积 EUV 光刻的可行 性,后期,在 10 mm×10 mm 区域获得 60 nm 密集 线条和 40 nm 孤立线条的大面积曝光。 1998 年,美 国 虚 拟 实 验 室(Virtual National Laboratory,VNL)等 曾 联 合 欧 洲 的 研 究 机 构 研 发 了 NA 为 0. 1 的 研 究 型 EUV 光 刻 机 ETS(Engineering Test Stand,ETS),其由四面反射镜构成的物镜缩小 倍 率 为 4 倍,曝 光 视 场 为 26 mm×1. 5 mm。
2001 年,VNL 通过 ETS 实验型样机实现了 100 nm 的特征 尺寸曝光[19- 20],2003 年,VNL 通过改进的样机 ETS2 实 现了 60 nm 特征尺寸曝光。2004 年,美国劳伦斯伯 克 利 国 家 实 验 室 (Lawrence Berkeley National Laboratory,LBNL)、美国劳伦斯利弗莫尔国家实验室 (Lawrence Livermore National Laboratory,LLNL)联 合蔡司(Zeiss)研制了小视场曝光系统 MET。其非球 面两反物镜的光瞳遮拦比为 30%,光刻物镜综合均方 根(RMS)波像差为 0. 4 nm。在 200 μm×600 μm 的静 态曝光区域,实现分辨率为 32 nm 的光刻成像。
2006 年,荷兰阿斯麦公司(ASML)研制了 NA 为 0. 25 的 EUV 样机 ADT(Alpha Demo Tools,ADT),其由六面反射镜构成的物镜缩小倍率为 4 倍、扫描曝 光视场为 26 mm×33 mm,获得了 32 nm 技术节点的 曝光图形。2007 年,日本 Nikon 研制了 NA 为 0. 25 的光刻样机 EUV1,其物镜缩小倍率为 4 倍,由六面非 球 面 反 射 镜 构 成,单 次 曝 光 可 实 现 30 nm 的 分 辨率。
2007 年,ASML 公 司 陆 续 研 制 了 TWINSCAN NXE:3X00 系列 EUV 光刻机,该系列 EUV 光刻机包括 NXE:3100、NXE:3300B、NXE:3350B、 NXE:3400B、NXE:3400C、NXE:3600D等,这些光刻机的光学曝光系统均由德国光学制造商蔡司 公司设计和制造,其曝光光学系性能如表 1 所示。
为了获得更高的分辨率,满足更高技术节点的 IC 制造需求,需要进一步增大 EUV 光刻机的 NA。为了 降低掩模阴影效应,并综合考虑产率等因素,提出的 NA 为 0. 55、采用变倍率物镜的下一代 EUV 光刻机,其扫描方向的缩小倍率为 8 倍,垂直于扫描方向的缩 小 倍 率 为 4 倍。 根 据 ASML 公 司 公 布 的 最 新 规 划,位于 Veldhoven 的高 NA 联合实验室,正在集成第 一台高 NA(NA 为 0. 55)的 EUV 光刻平台 EXE 系列,并有望于 2023 年建成并投入使用。
2002 年中国科学院长春光学精密机械与物理研 究所研制了国内第一套由小视场 Schwarzschild 物镜构成的 EUV 光刻原理实验装置,实现了 0. 75 μm 特征 尺寸的曝光。2017 年,中国科学院长春光学精密机 械与物理研究所报道其研制的小视场 EUV 曝光光学系统,由两面反射镜构成的投影物镜波像差 RMS 值优 于 0. 75 nm,构建了 EUV 光刻静态曝光装置,获得了 32 nm 线宽的光刻胶曝光图形,建立了 EUV 光刻关键 技术验证及工艺测试平台。
光刻机曝光系统的设计是光刻机的关键技术。然 而,EUV 光刻机曝光系统的设计技术、优化方法、设计 数据、公差分析、总体协同设计等都是光刻机研制的核 心机密,光学设计详实、全面的信息鲜见报道。国内外 文献和专利中,曝光系统设计的性能指标的披露,也有 所保留,鲜有全面、完整、详实、明晰的全套技术指标或 数据信息。 本文将结合国内外 EUV 光刻机曝光光学系统进 行光学设计研究,对国内外 EUV 光刻投影物镜系统、 照明系统的发展历程及其相关设计方法进行综述性介 绍。主要介绍极紫外光刻机投影物镜系统及设计方法,极紫外光刻照明系统及其设计方法,曝光光学系统 设计的关联技术。
2 极紫外光刻机投影物镜系统及设计 方法 EUV 光刻投影物镜是将掩模 IC 图形复制到硅片 面的核心子系统。光刻投影物镜的设计难点为必须在 大视场内,实现高 NA、极小像差的设计需求。早期试 验机型的 EUV 光刻投影物镜的结构是由两面或四面 反射镜构成。产品 EUV 光刻机由六面反射镜构成。
本节将按照物镜系统反射镜的数量和结构特征对应的 曝光系统,依次对其设计方法进行介绍。
2. 1 研究型 EUV 光刻投影物镜系统设计方法 早期实验型 EUV 光刻机样机的设计方法主要有 微分方程法、y - yˉ 法、仿形设计法以及初级像差方程 法,确定初始结构参数。主要方法包括: 1)微分方程法 1991 年,Wang 等提出了微分方程法。该方法 首先给定球面初始结构,以及第一面镜与第四面镜的 非球面参数;然后,利用理想光学系统的等光程原理,构建中间两个反射镜的微分方程;通过求解该微分方 程获得面型数据,并将其重新拟合成连续的非球面即 可实现由四面反射镜构成的 EUV 光刻投影物镜,其设 计示意图如图 3 所示。
表 1 ASML 的 EUV 光刻机曝光光学系统性能
Table 1 Performance of EUV lithography projection and illumination system of ASML


图 3 微分方程法示意图
Fig. 3 Schematic diagram of differential equation method
2)y - yˉ法
2000 年,Lerner 等通过设定反射镜上主光线高 度 y 与反射镜边缘高度 yˉ,建立反射镜光焦度、镜间距 和光线投射高度的关系,利用拉格朗日不变量对前述 关系式进行计算,求解出物镜系统的结构参数。
3)仿形设计法
2000 年 ,Li、Kinoshita 等设 计 了 NA 为 0. 15 的 由四面反射镜构成的非球面 EUV 光刻投影物镜,在 25 mm×0. 5 mm 的弧形视场内,实现 50 nm 光刻分辨 率,在全视场范围内畸变小于 0. 01%,像散几乎为零。
4)初级像差方程法
2010 年,北京理工大学常军等提出了一种基 于初阶像差方程的由四面反射镜构成的物镜设计方 法。该方法将由四面反射镜构成的物镜的结构参数划 分为两类:一类是反射镜的非球面系数,另一类是与系 统外形尺寸有关的结构参数。在计算过程中,首先确 定物镜中“部分”与系统外形尺寸有关的结构参数,然 后求解初级像差方程,计算剩余结构参量,从而获得所 需的 EUV 光刻投影物镜系统。通过上述方法设计了 NA 为 0. 13、缩小倍率为 2. 3 倍的由四面反射镜构成的 EUV 光刻投影物镜系统,在 50 mm 的视场内物镜 系 统 的 光 学 调 制 函 数(Modulation transfer function, MTF)接近衍射极限,如图 4 所示。

图 4 利用初阶像差方程组求解法得到 EUV 物镜示意图。(a)物镜示意图;(b)系统 MTF Fig. 4 Layout of EUV four mirror objective is obtained by solving the first order aberration equations. (a) Layout of the four[1]mirror objective; (b) MTF of the four[1]mirror objective
2. 2匀倍率由六面及多面反射镜构成的 EUV 光刻 投影物镜设计方法
IC 技术对更高分辨率 EUV 光刻机的需求,牵引 研究人员设计低像差、大视场、由六面和多面反射镜构 成的物镜系统。设计方法主要包括:基于现有结构的 仿形设计法、近轴搜索法、鞍点构造法、分组设计法以 及基于初级像差求解的自动设计方法。
1)仿形设计法 2003 年,根据 EUV 光刻投影物镜结构,仿形设计了 NA 为 0. 25 的大视场由六面反射镜构成 的 EUV 光刻投影物镜。2004 年提出了 NA 为 0. 25 的 由六面反射镜构成的物镜的设计优化方法,该设计在 26 mm×1 mm 的视场内,波像差小于 0. 4 nm,畸变小 于 3. 77 nm,分辨率可达到 50 nm。
2)近轴搜索法
2003 年,Bal 等提出了近轴搜索法,以寻找由 多面反射镜构成的极紫外光刻投影物镜可能的结构解 空间。该方法基于矩阵光学原理,通过引入约束条件 减少系统结构变量的数目,并对剩余的结构变量进行 穷举式搜索,最后利用近轴光线追迹进行遮拦判定,筛 选出无遮拦的物镜结构。2009 年,中国科学院光电技 术研究所杨雄等利用近轴搜索法设计了 NA 为 0. 25 的由六面反射镜构成的 EUV 光刻投影物镜以及 NA 为 0. 1 的由四面反射镜构成的物镜,NA 为 0. 25 的物 镜在 1 mm 的视场中,波像差小于 0. 26 nm,畸变小于 3 nm,NA 为 0. 1 的 物 镜 在 相 同 视 场 内 ,波 像 差 小 于 0. 64 nm,畸变小于 3 nm,结构如图 5 所示。

图 5 利用近轴搜索法得到的 EUV 光刻投影物镜示意图。(a)NA 为 0. 1 由四面反射镜构成的物镜示意图;(b)NA 为 0. 25 由六面 反射镜构成的物镜示意图 Fig. 5 Schematic diagram of EUV lithographic objective obtained by paraxial search method. (a) Layout of NA is 0. 1 four[1]mirror objective; (b) layout of NA is 0. 25 six[1]mirror objective
3)鞍点构造法
2008 年 ,荷 兰 代 尔 夫 特 大 学 Marinescu提 出 了鞍点构造法,即:在现有初始结构中引入鞍点的方 法 。 设 计 了 多 套 六 面 反 射 镜 和 八 面 反 射 镜 构 成 的 EUV 光 刻 投 影 物 镜 。 该 方 法 在 某 一 物 镜 初 始 结 构 中,插入两面反射镜,构造一个“鞍点”,该“鞍点”的 两 侧 对 应 不 同 的 优 化 路 径(即 评 价 函 数 下 降 的 路 径)。沿上述两条路径对系统进行优化,得到 2 个与 评价函数局部极小值所对应的新结构,其设计过程 如图 6 所示。
4)分组设计法 2013 年,北京理工大学李艳秋、刘菲等提出了极紫外光刻投影物镜的近轴分组设计法。通过近轴分 组设计,解决设计方法实施中计算量大、设计方向盲目 等问题,设计了 NA 为 0. 25~0. 7、包含 6~10 面反射镜 的 EUV 光刻投影物镜。
2013 年,北京理工大学李艳秋、曹振等针对高 NA 的 EUV 物镜设计需求,提出了基于真实光线追迹 的分组设计方法。避免了近轴分组设计光线追迹反复 迭代,高效实现最优设计,使得各镜组的光瞳可以直匹配。并通过上述方法完成了缩小倍率为 4 倍 NA 为 0. 33、缩小倍率为 8 倍 NA 为 0. 5 的 EUV 光刻投影物 镜系统的设计。
2015 年,中国科学院长春光学精密机械与物理研 究所王君等以公开的由六面反射镜构成的 EUV 光刻物镜为基础,利用分组设计法,结合渐进优化的方 式和 Q[1]type 非球面,设计了 NA 为 0. 33 的 EUV 光刻 投影物镜系统,在 26 mm×2 mm 的视场内波像差小于 0. 36 nm,畸变小于 1. 5 nm。

图 6 鞍点构造法过程示意图。(a)由六面反射镜构成的物镜示意图;(b)由八面反射镜构成的物镜示意图 Fig. 6 Schematic diagram of the saddle point construction method. (a) Layout of six[1]mirror objective; (b) layout of eight[1]mirror objective
2018 年,台湾大学 Hsiao 等,利用广义高斯常 数对分组设计法进行分析,并开发了 NA 为 0. 4、由八 面反射镜构成的 EUV 光刻物镜系统的自动设计程序。 该方法通过广义高斯函数,分析了各镜组参数之间的 关系,并将其作为在优化过程中物镜光学性能的约束, 利用此方法设计了 NA 为 0. 4 的由八面反射镜构成的 EUV 光刻物镜。
2020 年,中国科学院长春光学精密机械与物理研 究所 Wu 等提出了一种基于实际光线追迹并结合初 始结构参数与像差平衡的分组设计方法。该方法建立 了初始结构参数与初级像差之间的关系,通过模拟粒 子群退火算法,筛选初级像差平衡的初始结构,设计完 成了一套离轴 NA 为 0. 33 的 EUV 光刻投影物镜,该物 镜 在 26 mm×2 mm 的 弧 形 视 场 中 波 像 差 小 于 0. 19 nm,畸变小于 1 nm。
2022 年北京理工大学李艳秋、闫旭等提出了基 于双向真实光线追迹的分组设计方法。该方法通过在 正向光路和逆向光路的中的理想共轭视场点,进行真 实光线追迹,实现了非球面 EUV 光刻物镜初始结构的 计算。通过该方法设计完成了在 26 mm×2 mm 的弧 形视场内畸变小于 0. 25 nm,波像差小于 0. 2 nm、NA 为 0. 33 的极紫外光刻物镜系统如图 7 所示。

图 7 利用分组设计法得到 NA 为 0. 33 的大视场 EUV 光刻投影物镜结构图
Fig. 7 Layout of NA is 0. 33 EUV lithography projection objective by group design method
5)利用求解初级像差方程的自动设计方法 2022 年 ,华 中 科 技 大 学 Tan 等提 出 一 种 基 于 Seidel像差理论求解离轴的由六面反射镜构成的 EUV 光刻投影系统球面初始结构参数,借此进行方法设计。 该方法通过对初始结构进行光线追迹,用结构参数表 达初级像差,并设置不同的初始条件,获得不同的初始 结 构 。 通 过 该 方 法 设 计 完 成 了 两 组 NA 为 0. 25 的 EUV 光刻投影物镜系统,该物镜在 26 mm×1. 5 mm 的视场内波像差分别小于 0. 53 nm 和 0. 58 nm,畸变分 别小于 1. 2 nm 和 0. 8 nm,其结构如图 8 所示。 2. 3 高 NA 变倍率 EUV 光刻投影物镜系统设计方法 研制中的 NA 为 0. 55、变倍率采用 EUV 光刻机,引起学术界和产业界的广泛关注,国内外尚未公开完 善且成熟的物镜系统设计方法。公开的设计方法主要 有基曲率组合法、分组设计法、基于矢量像差理论 的初始结构计算法。

尚未公开设计方法的专利包括:2012年,Mann的 专利披露由六面反射镜构成的 NA 为 0. 5以及由八面反 射镜构成的 NA 为 0. 65 的变倍率光刻投影物镜系统的 设计。2016 年,Zeiss 公司 Schwab 等的专利披露 NA 为 0. 55的由八面反射镜构成的变倍率光刻投影物镜系 统设计结果和照明系统的部分设计参数。2017年至今, Zeiss公司公开了多套由六面反射镜、多面反射镜(>6) 构成的变倍率曝光系统的设计案例。
2016 年,北京理工大学李艳秋、刘岩等根据非 对称光学系统的一阶成像理论,提出了曲率组合设计 方法。该方法以缩小倍率为 8 倍的物镜系统初始结构 为基础,优化得到缩小倍率为 4 倍的同构系统,通过组 合两个球面系统的曲率参数,得到了变倍率初始结构 的设计。并利用该方法,完成了一套 X 方向缩小倍率 为 4 倍,Y 方向缩小倍率为 8 倍,NA 为 0. 5 的离轴、变 倍率、中心遮拦 EUV 光刻投影物镜的设计,其结构如 图 9(a)所示,该物镜在 26 mm×1 mm 的视场中波像差 小于 0. 73 nm,畸变小于 4. 9 nm。2021 年,北京理工大 学李艳秋、刘陌通过高阶自由曲面实现了大视场 NA 为 0. 55 变 倍 率 光 刻 投 影 物 镜 的 设 计 ,该 物 镜 在 26 mm×1. 5 mm 的视场中波像差小于 0. 85 nm,畸变 小于 0. 9 nm,其结构如图 9(b)所示。

图 9 变倍率 EUV 光刻投影物镜结构图。(a) NA 为 0. 5 极紫外光刻投影物镜示意图;(b) NA 为 0. 55 极紫外光刻投影物镜示 意图
Fig9 Structure of anamorphic EUV lithographic projection objective. (a) Layout of NA is 0. 5 EUV lithography projection objective; (b) layout of NA is 0. 55 EUV lithography projection objective
2022 年,北京理工大学李艳秋、闫旭等[91] 针对 NA 为 0. 55 的 EUV 光刻物镜最后一面反射镜直径过大的 问题,提出了一种大离轴、变倍率极紫外光刻物镜分组 设计方法。该方法对物镜结构进行了创新性设计,设 计了大离轴变倍率 EUV 物镜结构,实现了照明系统出 射并经掩模反射后的光线,定向到合理的位置,物镜系 统和照明系统彼此之间不会发生光路遮拦,获得结构 和性能均优的大离轴、变倍率 EUV 的物镜。该方法设 计的 NA 为 0. 55 的大离轴、变倍率 EUV 光刻投影物 镜,该物镜在 26 mm×0. 5 mm 的视场中波像差小于 1. 02 nm,畸变小于 0. 12 nm,如图 10 所示。
2021 年,中国科学院长春光学精密机械与物理研 究所 Yue 等基于矢量像差理论提出了一种离轴反射 式变倍率物镜系统的设计方法。该方法根据空间光线 追迹和分组设计原理,建立了变倍率物镜结构参数和 光学性能相关的评价函数,通过模拟粒子群退火算法, 选择了合适的物镜系统初始结构。利用此方法设计了 一套 NA 为 0. 55 的变倍率 EUV 光刻投影物镜,该物镜 在 26 mm×0. 5 mm 的视场中波像差小于 0. 42 nm,畸 变小于 2 nm,其结构如图 11 所示。
综上所述,国内外对匀倍率和变倍率的 EUV 物镜 系统设计研究均进行全面深入的研究。国外匀倍率极 紫外光刻物镜系统的设计、加工及制造技术已经成熟, 并有成熟的 EUV 光刻物镜产品用于 IC 制造中。国内 对匀倍率 EUV 光刻物镜系统的设计进行大量研究。 目前,在物镜系统的光学设计方面已经达到国际先进 水平。变倍率光刻物镜的光学设计,国内外均处于深 入研究阶段。其中,国外位于 Veldhoven 的高 NA 联合 实验室,正在集成第一台高 NA 为 0. 55 的 EUV 光刻平 台 EXE 系列,并有望于 2023 年提供给用户使用。国内,北京理工大学和中国科学院长春光学精密机械与 物理研究所对 NA 为 0. 33 和 NA 为 0. 55 的 EUV 曝光 系统的光学设计进行长期深入的研究,设计方法和设 计效果可比肩国际已披露的同类设计。

10 NA 为 0. 55 大离轴变倍率 EUV 光刻投影物镜
Fig. 10 Large off[1]axis NA is 0. 55 anamorphic EUV lithography projection objective

11 NA 为 0. 55 变倍率 EUV 光刻投影物镜
Fig. 11 NA is 0. 55 anamorphic EUV lithography projection objective
3 极紫外光刻照明系统及其设计方法 极紫外光刻照明系统是极紫外光刻曝光光学系统 的重要组成部分之一,要求在掩模面实现高均匀照明 (即照明非均匀度小于 1%),同时能够在出瞳面实 现分辨率增强技术所需的多种离轴照明模式。
早期,照明系统多采用临界照明结构,将光源直接 成像至掩模面,将孔径光阑成像至照明出瞳面。 1995 年,Haga 等采用临界照明原理设计了一种与两 反非球面物镜系统相匹配的照明系统,该系统为由四 面反射镜构成的掠入射式系统,可在掩模面实现一个 100 mm×2. 4 mm 的弧形均匀照明区域。2000 年,日 本姬路工业大学李艳秋、Kinoshita 等针对同步辐射光源束线特征和约束限制,根据临界照明原理设计了 一种与由三面反射镜构成的球面物镜系统相匹配的由 四面反射镜构成的照明系统,该系统实现了 150 mm× 3 mm 的环形均匀照明区域。
虽然临界照明系统易于实现,但照明均匀性受光 源均匀性影响较大,难以实现光刻照明系统对照明均 匀性的严格要求。因此为实现光刻需求的高照明均匀 性,研究人员采用科勒照明结构,并将波纹板或双排复 眼等匀光元件引入照明系统,以提高其照明均匀性。 目前使用的极紫外光刻照明系统主要由光源、匀光单 元和中继镜组组成,如图 12 所示。其中 EUV 光源 主要同步辐射源、放电等离子光源(DPP)和激光等离 子 光 源(LPP)。 目 前 ,产 品 EUV 光 刻 机 采 用 LPP 光源。

图 12 极紫外光刻照明系统光路示意图
Fig. 12 Schematic diagram of EUV lighting system
3. 1 匀光单元 EUV 光刻照明系统中的匀光单元的主要作用是 在掩模面实现高均匀照明。早期的 EUV 光刻照明系 统中使用的匀光元件是波纹板,但是其结构较为复杂, 光学元件较多,无法显著提升照明系统的光能利用率。 所以后期采用的匀光元件是反射双排复眼,以实现各种离轴照明模式和均匀性优于 99% 的高均匀性照明。
1)波纹板
1999 年,Chapman 等首次将波纹板用于 EUV 光刻照明,该系统在扫描方向实现了科勒照明,并结合 重叠匀光以实现高照明均匀性,如图 13 所示。2005 年,Tsuji等设计了一种单一匀光器的波纹板照明 系统。该系统需要七面反射镜,其光能利用率仅为 9. 5%。2009 年,Kajiyama 等设计了一套波纹板照 明系统,该系统中继镜组包含三面反射镜,照明系统波 纹板两侧放置平面反射镜,提高了照明均匀性;也可用 两片或多片波纹板提高照明均匀性,光能利用率小于 32. 1%。上述设计波纹板结构比较复杂,所用光学元 件较多,光能利用率并没有得到显著提高,因此未在光 刻机中得到广泛应用。

图 13 波纹板照明系统
Fig. 13 Layout of the ripple plate illumination system
2)双排复眼
目前,EUV 光刻照明系统采纳双排复眼作为匀光 元件。双排复眼第一排称为视场复眼,与掩模面共轭, 第二排称为光阑复眼,与照明光瞳面共轭。来自光源 的光经过视场复眼后,形成多个子光束,每一个子光束 在光阑复眼附近形成一个二次光源。二次光源经过中 继镜组后,成像于照明系统出瞳面。同时,视场复眼形 成的子光束与对应的光阑复眼组成匀光通道,各匀光 通道的照明光通过中继镜组后,叠加成像在掩模面上, 实现高均匀照明。
a)双排复眼设计方法
双排复眼包括视场复眼和光阑复眼,视场复眼和 光阑复眼由视场复眼微反射镜和光阑复眼微反射镜组 成。其中,通常各视场复眼微反射镜等间距地紧密排 布在圆形基板上,形成视场复眼,根据投影物镜物方视 场形状不同,视场复眼微反射镜的形状可以是矩形或 弧形。光瞳面的栅格划分决定光阑复眼数量,每一个 光阑复眼微反射镜对应投影物镜入瞳上一个栅格,通 过光线追迹确定其位置。光阑复眼微反射镜的数量应 多于视场复眼微反射镜的数量,以实现无光能损失的 照明模式变换。
2005 年,Antoni 等针对 EUV 光刻双排复眼照 明系统提出了一套初始结构设计方法。首先,根据设 计经验确定双排复眼的位置和结构参数,然后利用等 光程原理分别完成两片中继镜的设计,保证视场复眼 和光阑复眼能分别准确地成像在掩模面和系统出瞳 面上。 2013 年,北京理工大学李艳秋、梅秋丽、刘菲提出一种照明系统初始结构的逆向设计方法。该方法 定量地确定了各元件参数之间的关系,避免了元件反 复调整,有效地提高了系统设计效率。2015 年,该团 队提出了一套具有高能量利用率的、由 3 面反射镜构 成的 EUV 光刻自由曲面照明系统新结构,该系统由双 排复眼和一片二次曲面中继镜组成,并在保证照明均 匀性的同时大幅度地提高系统能量利用率。
2021 年,北京理工大学李艳秋、郝倩等提出了 一种极紫外光刻照明系统视场复眼的自动排布设计方 法。该方法建立了视场复眼临界间距计算模型,通过 该模型计算无碰撞的视场复眼,有效地解决了调整相 邻复眼微反射镜时,产生的碰撞和光线遮蔽的问题,使 用该方法设计完成一套照明均匀性 99% 的匹配 NA 为 0. 6 变倍率物镜系统的照明系统,如图 14 所示。

图14 匹配 NA 为 0. 6 变倍率物镜系统的 EUV 照明系统
Fig. 14 EUV illumination system matching the NA is 0. 6 anamorphic objective
b)双排复眼匹配方法
双排复眼是 EUV 光刻照明系统的主要匀光元件, 同时也是其实现多种离轴照明模式的关键部件。 由于每一个视场复眼微反射镜都可以与某种照明模式 下参与照明的光阑复眼微反射镜相匹配,而每一个光 阑复眼微反射镜也都可以接受来自任一视场复眼微反 射镜的照明光束。所以,通过调整视场复眼微反射镜 和光阑复眼微反射镜的对位匹配关系,改变光阑复眼 上的光强分布,从而实现多种照明模式。
早期的极紫外光刻照明系统所需照明模式较为简 单,所以双排复眼的匹配对位关系调整问题并不突出。 2008 年,Mann 等提出双排复眼对位关系应遵循“就近原则”,即每一个视场复眼微反射镜应和距离其最近 的光阑复眼微反射镜匹配,以减小复眼微反射镜倾斜 角,有利于照明模式的调整变换。

图 15 匹配 NA 为 0. 5 的变倍率物镜系统的 EUV 照明系统
Fig. 15 EUV illumination system matching the NA is 0. 5 anamorphic objective
2018 年,北京理工大学李艳秋、姜家华等提出了一种双排复眼匹配对位关系自动优化方法,根据双 排复眼微反射镜的倾斜引起掩模面照明光斑倾斜的特 点,利用组合优化算法,求解出双排复眼的最佳对位匹 配关系,以及此时复眼微反射镜的倾斜角。
3. 2 中继镜组
中继镜组是照明系统的关键组成部分,用以保证科 勒照明结构要求的两组共轭关系:即视场复眼和掩模面 的共轭、光阑复眼和照明光瞳面的共轭。中继镜组一般 位于双排复眼匀光单元之后、掩模面之前,匀光单元出 射的各子光束经中继镜组叠加成像到系统掩模面上。
2000 年,Zeiss 公司 Antoni等提出了双排复眼照 明系统的中继镜设计要求,并在双排复眼照明系统中, 利用掠入射中继镜产生投影物镜要求的弧形视场,但 未给出中继镜组的具体设计方法。
2005 年,Antoni 等提出一种基于二次曲面几何 焦点等光程性质计算二次曲面中继镜面型及位置的方 法。在正向光路中,该方法依据设计者的设计经验确 定视场复眼和光阑复眼的位置以及结构参数,再根据 二次曲面等光程原理进行中继镜组的设计。
2008 年,Mann 等提出了一种结合轴向放大率 计算中继镜组一阶参数的方法。该方法通过类比深紫 外照明系统光路,给出了极紫外照明系统中继镜组对 光瞳面和掩模面的放大倍率公式,并结合已知的照明 系统设计参数求解中继镜组的一阶参数。
2016 年,Schwab 等给出了由八面反射镜构成的 变倍率光刻投影物镜系统设计结果以及与之匹配的照 明系统的部分设计参数。其照明系统采用双排复眼结 构,两片掠入射中继镜为变形非球面,且曲率半径极 大,近似平面镜。
2017 年,北京理工大学李艳秋、姜家华等[115- 116] 以 矩阵光学为基础,建立了一种 EUV 光刻照明系统中继 镜组设计方法。该方法根据中继镜组的成像特性要求 和其结构参数之间的关系,可以直接获得多种满足预 定成像特性要求的中继镜组结构,有效提高照明系统 的设计效率,该方法设计的 EUV 照明系统很好地匹配 NA 为 0. 5 的变倍率物镜系统如图 15 所示。
2022 年,北京理工大学李艳秋、闫旭等[117] 利用矩 阵光学理论和方法,提出了一种自由曲面中继镜组设 计极紫外光刻照明系统方法。该方法通过使用变倍率 中继镜组,对外包络为圆形的二次光源进行不同倍率 的放大,从而得到所需要的椭圆形光源,并使用该方法 设计完成了一套结构更加合理、性能更好的、匹配 NA 为 0. 55 的变倍率物镜系统的照明系统,如图 16 所示。
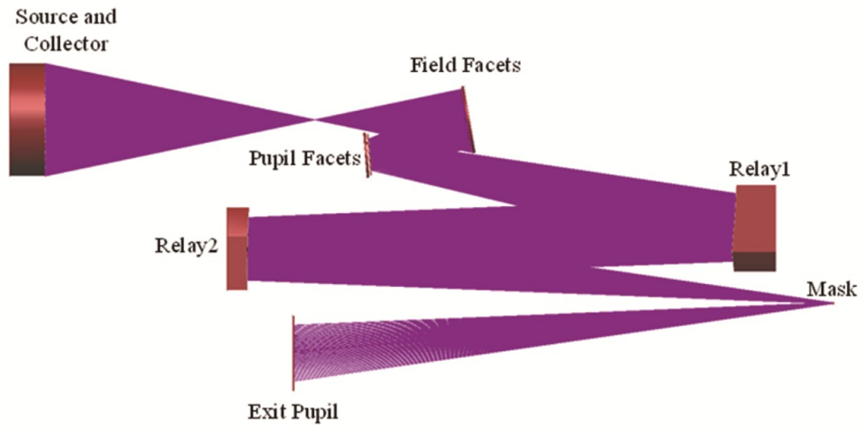
图 16 匹配 NA 为 0. 55 的变倍率物镜系统的 EUV 照明系统
Fig. 16 EUV illumination system matching the NA is 0. 55 anamorphic objective
综上所述,国内外对于匀倍率和变倍率的 EUV 照 明系统设计均进行全面深入的研究。国外匀倍率极紫 外光刻照明系统的设计、加工及制造技术已经成熟,并 有成熟的 EUV 光刻照明产品用于 IC 制造中。国内对 匀倍率 EUV 光刻照明系统的设计进行了大量研究。 目前,在照明系统的光学设计方面已经达到国际先进 水平。变倍率光刻照明系统的光学设计,国内外均处 于深入研究阶段。其中,国外位于 Veldhoven 的高 NA 联合实验室,正在将其设计加工完成的照明系统和物镜系统集成到 NA 为 0. 55 的 EUV 光刻平台 EXE 系列 中,并有望于 2023 年提供给用户使用。国内,北京理 工大学对 NA 为 0. 33 和 NA 为 0. 55 的 EUV 曝光系统 的光学设计,进行长期深入的研究,设计方法和设计效 果可比肩国际已披露的同类设计。
4 极紫外光刻机曝光系统设计的关联 技术 高性能极紫外光刻机曝光系统的设计研制,不可 避免地涉及加工、制造、应用方面的约束,例如极紫外 曝光系统的公差分析以及热像差分析,介绍 EUV 光刻 投影物镜系统的公差分析、物镜系统的变形及其对成 像性能的影响研究。
4. 1 EUV 光刻投影物镜系统公差分析 EUV 光刻投影物镜系统的设计和制造中,需要严 格控制各项制造公差。公差分析的结果可作为物镜可 制造性的评价依据,也能约束加工、装调,实现高性能 光刻投影物镜系统的研制和集成。但公开的公差分析 方法和加工、装调工艺数据报道有限。
2010 年,北京理工大学常军等实现了全视场畸变 小于 0. 25% 的由四面反射镜构成的光刻投影物镜系 统 设 计 ,并 进 行 了 公 差 分 析 ,其 结 果 表 明 ,在 5000 lp/mm 时 ,在 累 积 概 率 80% 和 50% 的 情 况 下 , MTF 值分别高于 0. 35 和 0. 55,证明了其结构参数具 有一定的可制造性潜力。
2015 年,北京理工大学李艳秋团队曹振等提出 了基于蒙特卡罗法的补偿器定位精度分析方法。通过 该方法对 NA 为 0. 33 的 EUV 光刻投影物镜进行补偿 器选择和制造公差分析,分析结果表明:各视场点波像 差均方根值在 97. 7% 的置信概率下小于 1 nm。同年, 该团队孙圆圆等[119] 提出了高 NA 极紫外光刻物镜的 公差分析的奇异值分解法。该方法针对 NA 为 0. 5 的 EUV 光刻投影物镜,进行补偿器选择和制造公差分 析,结果表明在 97. 7% 的置信概率下物镜系统的波像 差 RMS 值小于 0. 5 nm。2022 年,该团队马悦等[120] 提 出了一种全视场自适应公差分析方法。通过该方法针 对 NA 为 0. 33 的 EUV 光刻投影物镜,进行了补偿器的 选择和制造公差分析,结果表明物镜系统波像差在置 信概率为 97. 7% 时,RMS 值小于 0. 6 nm。
4. 2 EUV 光刻投影物镜系统变形及其对成像性能的 影响研究
EUV 光经过投影物镜系统后,将有 35% 的光能 量被吸收。因此该情况会引起 EUV 光刻投影物镜热 变形,进一步导致 EUV 光刻系统成像性能下降。
1)热像差对 EUV 光刻性能影响分析
1998 年,Ray[1]Chaudhuri 等利用有限元分析方 法,分析了由四面反射镜构成的 EUV 光刻投影物镜热 变形引起的波像差和离焦。结果表明:在 EUV 产率为 20 wafer/h,光刻投影物镜系统的热变形引起的波像差 RMS 值增加 0. 09 nm、离焦量变化 140 nm,可以满足 100 nm IC 制造要求。
2002 年 6 月,李艳秋在美国三束会议邀请报告中, 公布了 EUV 光刻投影物镜热变形分析及其对成像性 能 的 影 响 的 研 究 。 2003 年 2 月 ,李 艳 秋 对 其 设 计 的 NA 为 0. 25 的由六面反射镜构成的非球面共轴 EUV 光刻物镜,进行热变形分析及其热变形对成像性能影 响进行详细、系统研究。研究结果表明:在 EUV 产率为 80 wafer/h、部分相干照明下,由六面反射镜构 成 的 投 影 物 镜 系 统 的 热 变 形 引 起 的 线 宽 变 化 为 0. 39 nm、波 像 差 RMS 值 增 加 0. 7 nm,最 大 畸 变 为 8. 51 nm。其结果表明热变形对系统的成像性能产生 了显著的影响。
2007 年 ,刘 克、李 艳 秋 等在 32 nm 技 术 节 点、 NA 为 0. 25 的 EUV 光刻投影物镜、100 wafer/h 的产率 下,进行了 EUV 物镜动态热变形分析,及其对成像性 能影响研究。研究结果表明,M5 反射镜最高升温为 8. 48 ℃,最大热变形量 RMS 为 2. 55 nm。反射镜的热 变形导致了 52 nm 的焦面移动、0. 32 nm 的波像差和1 nm 的畸变。可见,反射镜热变形引起的波像差进一 步增大。 2012—2016 年 ,北 京 理 工 大 学 李 艳 秋 团 队 杨 光 华 、刘 岩在 125 wafer/h 产 率 条 件 下 ,对 面 向 22 nm 及更低技术节点的光刻物镜的热变形及其影响 进行了分析补偿。研究结果表明,反射镜最高升温为 9. 77 ℃,最大热变形量 RMS 为 4. 83 nm。反射镜的热 变 形 导 致 了 96 nm 的 焦 面 移 动 、0. 39 nm 的 波 像 差 RMS 和 6. 96 nm 的畸变。文中研究了热变形的补偿 技术,补偿热变形后的物镜波像差小于 0. 69 nm、畸变 小于 5. 43 nm。
2) EUV 光 刻 物 镜 系 统 热 像 差 影 响 补 偿 及 控 制 方法
随着技术节点不断提升,反射镜变形对成像性能 的相对影响也就越来越大,因此需要对 EUV 光刻物 镜热像差效应进行有效控制。
Zeiss,Nikon 等公司公布了多种反射镜热变形的 控制方法。这些方法在反射镜基底加入冷却通 道,通过冷却气体或液体的循环流动来降低反射镜的 热量,从而控制反射镜通光表面的温度分布。
2013 年荷兰代尔夫特大学的 Saathof 等提出 了一种自适应主动镜装置。该装置通过热辐射激励器 来控制变形镜的面形进而补偿附加像差,避免了与变 形镜的直接接触,确保了物镜系统的机械稳定性。
2015 年 Habets 等提出了压电陶瓷激励的变 形镜、反射镜刚体位移和工件台的刚体位移协同调整 方案。仿真结果可知,通过该方案可以校正约 93% 的 热像差。
2016 年北京理工大学李艳秋、刘岩等提出了离 球量预修正法对反射镜热、重力变形引起的附加像差 进行控制。该方法依据有限元分析和光学仿真预测的 附加像差,对各自由曲面离球量进行重新设计和修改, 引入与附加像差类型相同,大小相等,符号相反的补偿 像差,实现在光学设计阶段对附加像差的预控制,使物 镜系统在实际应用中维持高成像性能,进一步降低反 射镜附加像差的控制难度和系统的复杂度。
5 结 论
介绍了极紫外光刻机曝光光学系统光学设计研究 与进展。从 20 世纪 80 年代 H. Kinoshita 首次公布了 EUV 光刻曝光结果开始,EUV 光刻机曝光光学系统 的发展依次经历了 NA 小于 0. 25 的实验型 EUV 光刻 系统、NA 为 0. 33 的 EUV 光刻系统以及 NA 为 0. 55 的 变倍率 EUV 光刻系统。国内外对 EUV 光刻机的物镜 系统和照明系统的设计方法均进行深入的研究。近 年,国外已经具备 EUV 光刻机物镜系统和照明系统的 设计、加工、检测及制造能力,NA 为 0. 33 的 EUV 光刻 机 已 用 于 7~3 nm 技 术 节 点 的 IC 制 造 ,且 正 在 研 制 NA 为 0. 55 的变倍率 EUV 光刻物镜系统和照明系统。 国内相关研究聚焦在物镜系统和照明系统的设计、公 差分析、曝光系统热变形分析及其控制研究,北京理工 大学和中国科学院长春光学精密机械与物理研究所长 期从事高性能 EUV 光刻物镜及照明系统的设计研究, 设计方法及设计效果与国际披露的同类设计处于相似 水平,这为我国 EUV 光刻机的研制奠定了良好的基 础、培养输送了大量的人才。
参 考 文 献
[1] Suzuki K, Smith B W. Microlithography: science and technology [M]. 2nd ed. Boca Raton: CRC Press, 2007.
[2] Graeupner P, Kuerz P, Stammler T, et al. EUV optics: status, outlook and future[J]. Proceedings of SPIE, 2022, 12051: 1205102.
[3] The International Roadmap for Devices and Systems 2022[EB/ OL]. [2023-04-30] https://irds.ieee.org/.
[4] Raley A, Huli L, Grzeskowiak S, et al. Outlook for high-NA EUV patterning: a holistic patterning approach to address upcoming challenges[J]. Proceedings of SPIE, 2022, 12056: 120560A.
[5] Migura S, Kneer B, Neumann J T, et al. Anamorphic high-NA EUV lithography optics[J]. Proceedings of SPIE, 2015, 9661: 96610T.
[6] Born M. Principles of optics[M]. Oxford: Pergamum Press, 1980.
[7] 陈宝钦 . 光刻技术六十年[J]. 激光与光电子学进展, 2022, 59 (9): 0922031. Chen B Q. Lithography technology during the past six decades [J]. Laser & Optoelectronics Progress, 2022, 59(9): 0922031.
[8] 李艳丽, 刘显和, 伍强 . 先进光刻技术的发展历程与最新进展 [J]. 激光与光电子学进展, 2022, 59(9): 0922006. Li Y L, Liu X H, Wu Q. Evolution and updates of advanced photolithography technology[J]. Laser & Optoelectronics Progress, 2022, 59(9): 0922006.