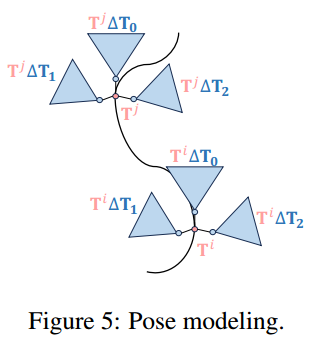
task1
点击查看代码
#include <stdio.h>int main()
{printf(" o\n");printf("<H>\n");printf("I I\n");printf(" o\n");printf("<H>\n");printf("I I\n");system("pause");return 0;
}
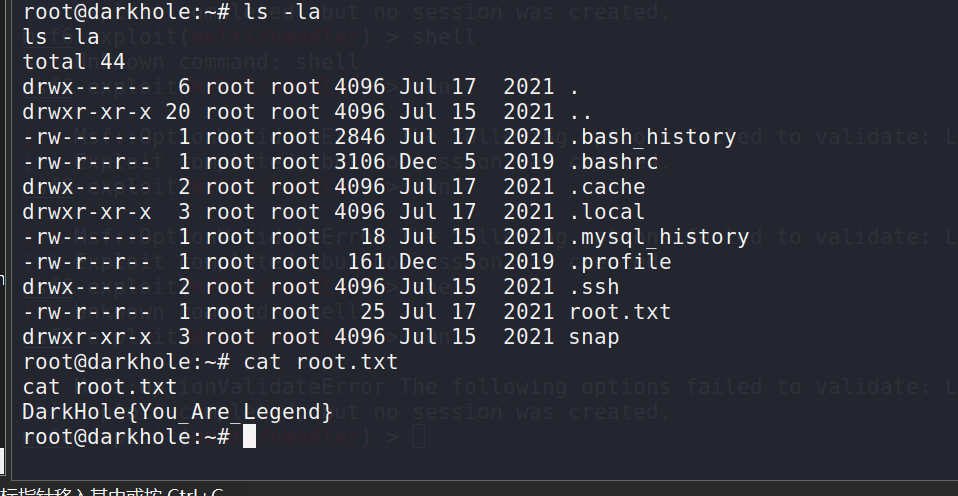
点击查看代码
#include <stdio.h>int main()
{printf(" o\t");printf(" o\n");printf("<H>\t");printf("<H>\n");printf("I I\t");printf("I I\n");system("pause");return 0;
}
task2
点击查看代码
#include<stdio.h>
#include<stdlib.h>int main()
{float a,b,c;scanf("%f%f%f",&a,&b,&c);if(a+b>c&&a+c>b&&b+c>a)printf("能构成三角形\n");elseprintf("不能构成三角形\n");system("pause");return 0;
}
task3
点击查看代码
#include<stdio.h>
#include<stdlib.h>int main()
{char ans1,ans2;printf("每次课前认真预习、课后及时复习了没?(y或Y表示有,n或N表示没有):");ans1=getchar();getchar();printf("\n动手敲代码实践了没?(y或Y表示有,n或N表示没有):");ans2=getchar();if((ans1=='y'||ans1=='Y')&&(ans2=='y'||ans2=='Y'))printf("\n罗马不是一天建成的,继续保持哦\n");elseprintf("\n罗马不是一天毁灭的,我们来建设吧\n");system("pause");return 0;
}




去掉后程序在输入第二个回答后自动关闭
因为在回答时输入了“答案”“回车”“答案”,getchar()是为了抵消中间回车对第二个答案的影响。
task4
点击查看代码
#include<stdio.h>
#include<stdlib.h>int main()
{double x,y;char c1,c2,c3;int a1,a2,a3;scanf("%d%d%d",&a1,&a2,&a3);//字母缺少&printf("a1=%d,a2=%d,a3=%d\n",a1,a2,a3);scanf("%c%c%c",&c1,&c2,&c3);printf("c1=%c,c2=%c,c3=%c\n",c1,c2,c3);scanf("%lf%lf",&x,&y); //%f,%lf",&x,&y改为%lf,%lf",&x,&yprintf("x=%f,y=%lf\n",x,y);system("pause");return 0;
}
task5
点击查看代码
#include<stdio.h>
#include<stdlib.h>int main()
{int year;year=1000000000;year=(year+0.5)/3600/24/365;printf("十亿秒约等于%d年\n",year);system("pause");return 0;
}

task6
点击查看代码
#include<stdio.h>
#include<math.h>int main()
{double x,ans;while(scanf("%lf",&x)!=EOF){ans=pow(x,365);printf("%.2f的365次方:%.2f\n",x,ans);printf("\n");}return 0;
}

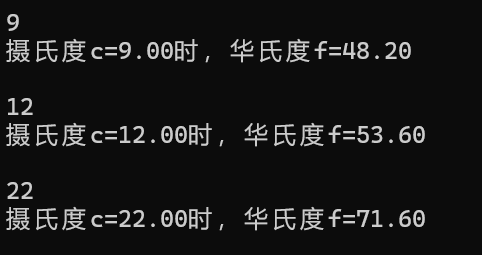
task7
点击查看代码
#include<stdio.h>
#include<math.h>int main()
{double c,f;while(scanf("%lf",&c)!=EOF){f=(9*c)/5+32;printf("摄氏度c=%.2f时,华氏度f=%.2f\n",c,f);printf("\n");}system("pause");return 0;
}
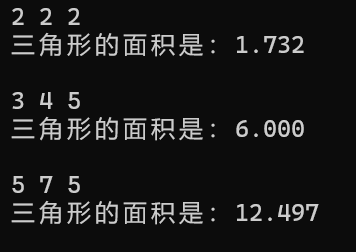
task8
点击查看代码
#include<stdio.h>
#include<stdlib.h>
#include<math.h>int main()
{double s,a,b,c,S;while(scanf("%lf%lf%lf",&a,&b,&c)!=EOF){s=(a+b+c)/2;S=sqrt(s*(s-a)*(s-b)*(s-c));printf("三角形的面积是:%.3f\n",S);printf("\n");}system("pause");return 0;
}

![LeetCode[题解] 1261. 在受污染的二叉树中查找元素](https://assets.leetcode-cn.com/aliyun-lc-upload/uploads/2019/11/16/untitled-diagram-4-1-1.jpg)